Classical Reinforcement Learning
- What is Reinforcement Learning
- Questions
- Questions
- Questions
- Actions & Policy
- Exploration vs Exploitation
- Markov Decision Processes
- Questions
- Optimal Policy
- Model of the Environment
- Summary
- Questions
- References
Preface
Reinforcement Learning (RL) is the field of machine learning in which an 'agent' (i.e. the software being trained) learns to take actions to maximise some cumulative 'reward'.
Some classical examples of RL are driverless cars, game playing agents (Chess, Go, etc.), mechanical robots in factories/warehouses etc. The field of Reinforcement Learning has seen some major breakthroughs in recent years:
- DeepMind and the Deep Q learning architecture in 2014
- Beating the champion of the game of Go with AlphaGo in 2016 (you can watch the short video related to it here),
- OpenAI and the PPO in 2017
- How Deep Blue beat a chess grandmaster
These achievements have in turn inspired other researchers and companies to turn to reinforcement learning. The most noticeable is the field of driverless cars. Several automobile companies are hard at work for building cutting-edge-technologies for self-driving cars. Tesla's Autopilot is one such system. Its 'driver assistance system' offers features such as lane-centring, adaptive cruise control, self-parking, etc. Alphabet's Waymo, Ford's self-driving car are locked in the competition to reach the final level of autonomous driving.
There have been interesting developments in the field of robotics as well, where robots are trained for different tasks such as finding defects in objects, carrying an object from one place to other. Fanuc has deployed a robot that uses RL to pick a device from one box and put it in a container.
Another domain where RL is used is finance. RL is turning out to be a robust tool for evaluating trading strategies. Many companies are leveraging the 'Q-Learning' algorithm of RL with the simple objective of maximising the 'rewards' i.e. profits. You will study Q-learning and some of these applications in this course.
The Evolution of RL
The roots of Reinforcement Learning, acronymed as RL, go back to a psychologist, Edward L. Thorndike who talked about learning by trial and error. He studied cats in puzzle boxes. The cat was motivated to come out of the box. The cat would fall around and eventually stumble upon the latch that would open the box. Once the cat managed to get out, the same cat would be put in the same box again. After successive runs, he observed that cats were getting faster in finding and pulling the latch. And on the basis of this behavioural experiment, Thorndike put forward the 'Law of Effect':
"Responses that produce a satisfying effect in a particular situation become more likely to occur again in that situation, and responses that produce a discomforting effect become less likely to occur again in that situation."
What is Reinforcement Learning
Ever noticed how an infant learns to walk? She puts a step forward. If she falls, she realises 'that was probably the wrong way'. She keeps trying and relies on the feedbacks (e.g. falling, being able to walk easily, etc.) to judge whether ‘the current technique is correct or not’.
You learn from your interactions with the world aka 'environment'. When you are learning to drive a car (assuming you have no instructor), you completely rely on the feedback you get from the surroundings. If you cross a lane or come too close to a tree, you change your technique (or actions, such as putting more breaks, turning the steering a little lesser, etc.).
Let’s first start with an overview of the RL problem and look at some examples which will help build an intuition of RL.
- Solving a maze
- Managing Investment Portfolio
- Deciding among the pickup requests in cab-service scenario
- Process Control System
-
Humanoid robot
- Say, an engineer is learning to design a humanoid robot and his objective is to make it stand.
- He can do that by turning some joints. A wrong turn of a joint can make it fall.
- By trial and error experience, he will learn which sequence of turning joints is making robot stand and which is not.
- This is a reinforcement learning problem.
- Here, the engineer is the agent and the robot on which he is taking the actions is the environment; actions are 'turning the joints' and consequences could be robot falling or standing up.
Note:
- The agent is any robot that is trying to learn the task,
- While the environment is the world around it that gives it the feedback.
When you are learning to walk, you are the agent and the surroundings are the environment.
Reinforcement learning is similar to 'human learning'. Remember the first time you were trying to learn to ride a bicycle? Learning how to balance and manoeuvre comes with experience. Maybe, when you had a fall (a negative experience), you learnt that the action which led to the fall was wrong and you should not do that again. Similarly, when you had a positive experience, you learnt what actions (how to keep your feet on the pedal, how much to turn the handlebar, etc.) led to a happy ride.
The agent can interact with the environment, and take an action of its choice. However, it cannot control the consequences i.e. the outcome of taking the action. The consequence is a property of the environment itself.
Questions
A mobile robot has the job of collecting trash in an office. It has sensors for detecting cans, and an arm that picks it up. It runs on a rechargeable battery. The robot’s control system has components for interpreting sensory information, for navigating, and for controlling the arm.
It makes decisions depending upon the charge levels of battery. Consider there are three levels of charge: ‘high’, ‘medium’ and ‘low’. The agent needs to decide whether to (1) actively search for a can, (2) remain stationary and wait for someone to bring it a can, or (3) head back to its home base to recharge its battery.
Who is the agent in this case?
- Robot's control system
- It’s a high-level agent which is responsible for interpreting sensory information, for navigating, and for controlling the arm and gripper
What is the environment in this case?
- Office Environment
- Environment presents a new state and reward to the agent basis its actions
What are the actions in this case?
- Agent’s decisions: (1) actively search for a can, (2) remain stationary and wait for someone to bring it a can, or (3) head back to its home base to recharge its battery
- Actions are tasks that an agent can perform
Investment Management: You want to manage your investments such that the profit is maximised. Given that you can either buy, hold or sell a stock, what are the possible consequences (or outcomes)?
- % Profit or Loss or no-profit-no-loss
- any action whether it’s buying or selling would either result in a profit or a loss or a no-profit-no-loss
Which of the following is the best possible explanation of RL?
| Statement | T/F |
|---|---|
| RL is a learning problem where an agent learns from environment with help of a teacher telling what is right or wrong | F |
| RL is a learning problem where an agent learns from the environment by taking actions and controlling the consequences in its favor | F |
| RL is a learning problem where an agent is trying to learn from its environment by taking an action and understanding the consequences; in order to achieve an objective | T |
- Environment doesn't tell the agent what is right or wrong. It tells the agent what is the consequence of its action.
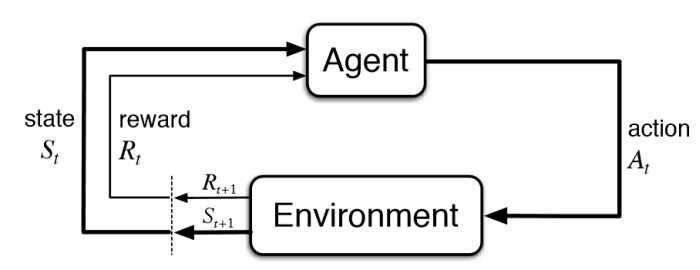
Agent-Environment Interaction
- agent observes the environment, then
- takes an action which he thinks is good. After taking the action,
- the environment tells him how good that action was, in the form of rewards; this also presents a new observation to the agent.

Example
Let’s take the example of a student learning to maximise grades in his training.
- He has grades of the exam that happened two weeks back.
- He observes the subjects in which he scored lower.
- And then studies (action) only for those subjects.
- For the remaining time, he plays or surfs. After a week, he goes through the exams again.
- His grades improve and now only in one subject his marks are a little less than the average.
- So, the action of studying had a positive consequence as his marks increased.
- Apart from this, he observes the subject in which he scored low marks - that becomes his new observation.
Reward, in this case, is the increase in marks. However, note that the reward is not enough to judge his action. What if he had failed the subjects for which he did not study in the second attempt?
Reward only tells you how well you are carrying out the task. It does not guarantee that this is the best action.
In other words, reward is an indicator, or a 'weak signal', which roughly indicates whether the agent is taking actions in the right direction.
Unlike supervised learning, which classifies each observation as 'right' or 'wrong'; reward in reinforcement learning is just a number indicating how well you are performing the action. The robot needs to try and find out which actions are better than the others, if not the best. The objective here is to maximise the cumulative reward as the sequence of actions is taken.
Two Types of Tasks
- Continuous: tasks that do not have a definite end - e.g. learning to walk, controlling a chemical plant, driving a car
- Episodic tasks: tasks that have a definite end - e.g. most games (videos games, Chess, Ludo) etc. are episodic since at the end of the game the agent either wins or loses.
Questions
Rewards are under the control of the agent, i.e., after taking an action, it can modify the rewards obtained
- False
- Rewards are the property of the environment
Map out tasks as continuous or episodic
| Task | Continuous / Episodic |
|---|---|
| Automated stock trading | Continuous |
| Solving a maze | Episodic |
| Playing Tic-tac-toe | Episodic |
- Episodic tasks end in a terminal state, i.e., they terminate after time T.
Objective of RL agent is to:
- Find sequence of actions that accumulate maximum rewards
- The objective of RL agent is to carry out task well. By doing the task well, it implies that its actions should be more aligned to accumulate maximum rewards
State Vectors
- A state is a representation of the environment at any point in time.
- The environment will give all the signals, but how relevant those signals are for the agent to take an action is what you have to decide.
- You can consider state vector as a list of features that help the agent to take an action.
- For each RL problem, state vector would be different.
Let’s take the example of a humanoid robot where your objective is to make him stand. Now, the environment offers you values for the following:
- pressure & temperature at some chemical plant
- robot’s joint positions
- the angle at the knee joint
- Bitcoin’s current price
Would all these variables impact the agent’s decision making? No. The pressure and temperature at the chemical plant would not help you decide which joint to turn. The action you need to make is on the basis of ‘which joint of the robot should be turned’. So, your 'state' will be the representation of robot’s joint positions and the angle at knee joint. These two are enough to take the next action.
State is your representation of the environment. Perhaps the environment would have a lot of things, but the state that you want to take will determine which parameters in the environment really matter to you.
Examples of State Vectors, Actions and Rewards
- Process Control System
- State Vector: (Pressure, Temperature)
- Action: Turning knobs, valves
- Rward: Yield
- Investment Management Portfolio
- State Vector: (amount of cash, % investments in mutual funds, equity, FDs, etc.)
- Action: Sell / Buy / Hold
- Reware: Profit / Loss %
- Cab Driver Problem
- State Vector: (location, time, day)
- Action: Service a request
- Reward: Money earned from a trip
So, the representation of the environment which is necessary for the agent to take an action is called state. In any real-life scenario, it will be left on your judgement to decide what variables are good for the agent to take an action.
Questions
Which statement is incorrect?
| Statement | Correct / Incorrect |
|---|---|
| Agent interacts with the environment in the form of actions, and the environment responds to the agent by rewarding these actions and by presenting a new set of state vectors to the agent | Correct |
| Reward is in the form of a vector | Incorrect |
| State is usually represented by a number | Incorrect |
| Agent observes the state variables and basis that takes some action | Correct |
- State represents what features agent wants to observe from the environment. It is usually represented in form of a vector.
- Environment rewards the agent's action as a number. And it is just a weak signal of telling how good or bad an action is
Self-driving cars: You are designing a self-driving car and you want the car to observe the values of the state vector to take the next action. Which of following options do you think makes a good state vector for this problem.
- (Current position of car on road, speed of car, the angle of the steering wheel, distance of obstacles (other vehicles, buildings, pedestrian), the current position of obstacles (other vehicles, pedestrian) image in rear-view mirror, road condition, white marks on road, current traffic signal)
Inventory Management: Say you are the owner of a retail shop. Your objective is to maximise the profits earned in a day. So, you need to place an order to meet the demand. On any day, you observe the ‘state vector’ and take an action for placing an order (from the supplier) which arrives later the next day. Assume that your demand is a function of the day of the week. Which of the following is the most relevant state vector?
- (Current inventory level, the day of the week)
Deciding cover for each movie/series on Netflix homepage: Say, Netflix wants to customize the home page for each of the customer. It wants to show very relevant cover photo for each movie or series it recommends. Example, a person watching a lot of horror movies, will be interested if he is shown some intense scene from the movie as a cover photo. So, the action is to decide the cover photo, basis some state vector. What could be the state vector in this case? Choose the most appropriate option.
- (Customer’s past preferences of genres, actors, directors, ratings of movie he has watched)
Objective of RL Agent
So far, you have learnt that the agent is interacting with the environment in an 'optimal manner' to achieve the objective. But, how do you define the objective of an RL problem? Can you say that the objective is to gather maximum rewards?
Take an episodic task, say a game of tic-tac-toe. How will you calculate the reward for each O (or X) you marked? You will get a reward after you win or lose the game. What is the agent’s end-objective in this case? Similarly, for a continuing task, say for stock market trading, you can define your reward as how much profit you earned in a month or a day. There is no end to continuing tasks, so how are you going to parametrise your objective?
You can summarise the objectives of the RL agent in the following manner:
- The objective of episodic tasks is to find such a sequence of actions that will make the majority of episodes successful.
- For continuing tasks, break it into multiple episodes and then find out actions that maximise the average rewards earned from those episodes.
Note
- The objective is defined after observing the state vector from the environment
- Just like the reward, the objective is also a property of the environment
Question
A self-driving car gets rewarded for every 1km of a ride. And after every 8 hours, it needs to charge itself. Which of following is the correct objective of a self-driving car?
- Find out an action sequence that could accumulate maximum rewards in maximum rides.
- Since the car needs to charge itself after every 8 hours, this makes it an episodic task. And the objective then would be to find a sequence of actions that would accumulate maximum rewards.
Actions & Policy
So far, you have two pieces of information:
- An action leads to a reward and a change in state.
- The objective of the RL agent is to find the sequence of actions to maximise overall rewards.
How does an RL agent take an action from a given state? Are there some rules defined for each scenario? Or is there some mathematical model of the environment which the agent learns over time and then takes an action?
Agent needs to learn about the environment before it behaves in an optimal manner. Learning essentially means that the agent interacts with the environment by trying out different actions and understanding their consequences.
The consequence is two-fold, one in form of rewards, other in form of change of state. It is like a child learning how to walk. He needs to understand which foot to put forward, to keep both the legs straight, etc., and the consequence for each of these. So, he will remember what action he took and what consequence it led to. This memory of action and consequence is called knowledge-base or history for an RL agent.
Now, the agent can look up in its knowledge base and see which action leads to the best consequence when in a given state. You could also build a mathematical model of the environment rather than storing all possible (action, consequence) pairs.
All this is good for smaller problems where there are very few states and actions. In more realistic situations, it is very difficult to explore all possible states and actions and therefore makes it difficult to build a knowledge base or a model.
A policy is a set of rules which helps the agent decide the action that it should take in a given state such that the agent can maximise its rewards in the long run. There are two types of policies:
- A deterministic policy:
- A probabilistic policy:
A probabilistic policy becomes deterministic when
For example, for a novice doing investment portfolio management, the policy could be: whenever the stock price reaches a certain threshold, he will sell all the stock. This is the deterministic case. He has fixed the action for a state. A probabilistic policy, on the other hand, could be: whenever the stock price reaches a certain threshold, sell the stock 60% of the times, retain the stock 35% of the times, and for rest of the times, buy the stock. What if the stock price keeps on increasing and he holds the stock rather than selling it? Well, he could earn more profit by selling it later.
Which of following correctly defines a policy?
- A mapping from state that helps the agent to figure out what action needs to be taken
Exploration vs Exploitation
Exploiting an action is fine if you have exhaustively explored all the actions from a given state. But, this is generally not the case in real-life situations. In most scenarios, you would have explored only a small fraction of all possible actions. What if there exists an action that can get you a lottery? Wouldn't you go exploring more? But at the same time, you also don’t want to lose out on the benefits of the current action, in case you don’t find good options while exploring.
So, to handle this problem, typically, a small window of exploration is set.
What is Exploitation
- Exploiting the current option which you already know is reaping benefits
Markov State
In the previous segment, you learnt that when in a given state, an agent takes an action according to a policy (which is learnt during training. The action leads to a change in state and possibly generates a reward. One brute force way to learn a policy is to actually remember all the possible pairs of state, action and reward. But that is often not feasible. For example, in a game of (say) Chess, this set may comprise of a million possible combinations. In more complex problems (such as playing Go, driving a car etc.) this may be further intractable. Therefore, in the RL problem, we make a Markovian assumption.
The Markov assumption states that the current state contains all the necessary information about all the past states the agent was in and all the past actions the agent took. It assumes that the current state is sufficient for taking the next action.
You can consider a Markov state as some function of the knowledge base that captures all relevant information from the knowledge base. And once ‘Markov state’ is known, the knowledge base can be thrown away. What action the agent needs to take next or what possible state an agent can land on given he has taken an action - all of this can be determined from the Markov state.
Markov state contains all necessary information that helps to predict the future state.
Example
Let's consider a robot learning to fly a plane. It has the knowledge base of position, the speed at each and every time step. Now, at some position, the robot makes a right turn. The next state of the plane will be dependent on what the current position and speed of the plane are, and the robot has taken the right turn. It doesn't need to know how it arrived at the current position or how it gained its current speed. Its current state vector (current position, current speed) and action satisfy the Markovian assumption.
Markov Decision Processes
All these processes that work in accordance to Markov property are called Markov Decision Processes (popularly called MDPs). The word ‘Decision’ in MDP takes into account actions taken by the agent in a given Markov state. MDP is the formal name of a sequential decision-making process. All the RL problems set its ground on MDPs, i.e., work on the assumption of the Markov property.
The following points apply to an RL problem:
- An agent learns how to behave in an environment by taking actions.
- Then observing the consequences (rewards and next state), of the action taken.
- The control objective of the agent is to learn a policy to accumulate maximum cumulative rewards over a period of time.
- All of RL problems are based on the Markov assumption: the current state contains all relevant information to take the best action.
Questions
A policy is a mapping from perceived states of the environment to actions to be taken when in those states
- True
- Policy defines what action RL agent will taken when in a given state
Stochastic Policy is generally preferred over deterministic. Why?
- Stochastic policy gives a chance to explore, whereas deterministic does not
- In stochastic policy, the agent has an option to choose among different actions possible. In the case of deterministic policy, only one action is possible. So, stochastic policy is inherently exploratory, whereas deterministic is not
- Stochastic policy provides an edge over deterministic by allowing to choose some less probable actions
What is Markov in Markov Decision Process?
- The state vector
- Markov assumption is for states. That state should be sufficient to make the current decision
Value Function
Let’s say an agent is learning to play a game where it has to fight enemy's drones in a battlefield. Assume that his current location and the number of bullets in his gun defines his state. His action could be - to move forward or to shoot. The reward is the number of drones he shot without getting killed. Let’s say he found a position behind a wall and he can shoot as many drones as he wants without getting killed.
The position behind the wall has offered him an advantage and is more valuable to him. On the other hand, the agent once found himself out in the middle of the battlefield where he was an easy target for the drones.
This implies that some states are inherently more valuable than others, i.e. the agent prefers some states over others. It will be useful if the agent learns the 'values' of all these states.
State value function
Value function helps in evaluating a state. Consider the following table.
| column 1 | column 2 | column 3 |
|---|---|---|
| 3 | 4 | 9 (Target) |
| 2 | 5 (current) | 8 |
| 1 | 6 | 7 |
Assume that you want to reach cell 9 from the current state (which is cell 5). Assuming you can take actions only from the following set {Left, Up, Down, Right}, the possible next states you can be in, starting from cell 5, are - cell 2, cell 4, cell 6, cell 8. You evaluate all the states, based on how valuable each of these states would be in achieving the final goal of reaching state/cell 9.
Clearly, if you move to cell 4 (or 8), the chances of reaching cell 9 in the next step are higher than if you were in cell 2 or 6.
The positional advantage you have simply by being in a particular state is the intrinsic value of the state. For example, it is far more valuable to be in state 4 as opposed to state 3, because the immediate step after 4 will result in achieving the target i.e. state 9. So, state 4 is inherently more valuable than state 3. So, you can select an action that helps you achieve the state with the maximum 'value'.
A value function tells you how good it is for the agent to be in that particular state. It is also known as the state value function. The agent would want to be in a state such that its total rewards (immediate + expected future rewards) are maximised.
- Value Function:
Total Rewards
Consider that the agent starts from state S0, takes an action A0 and gets an immediate reward of R0 and ends up in state S1. From there he takes action A1 and so on. So, his episode is:
(S0, A0, R0), (S1, A1, R1), (S2, A2, R2), (S3, A3, R3), (S4, A4, R4), S5
where S5 is the terminal state.
Now, you want to calculate total rewards earned from State S2, that will be: (R2)+ (R3+R4). Here R2 is an immediate reward and (R3+R4) are future rewards.
Action value function
On a similar note, we can define a value function for action, i.e., define how valuable it is to perform an action in a particular state. Consider the game of chess - you moved your rook to take the opponent’s queen and got an immediate high reward for this move. But taking this action might have been useful in some other state, but in this state (where the King gets endangered) this action is quite unfavorable.
You take actions that bring about states with high value, i.e. actions that fetch high immediate reward + expected future rewards because these actions bring the greatest amount of reward over the long run.
| column 1 | column 2 | column 3 |
|---|---|---|
| 3 | 4 | 9 (Target) |
| 2 | 5 (current) | 8 |
| 1 | 6 | 7 |
Consider the above example: If you (the agent) are in state 5, let’s say you have the choice of performing 4 actions in that state. You can go either left, right, up or down. All actions are not equally valuable. Some actions can make you closer to the target. So, in state 5, actions ‘up’ and ‘right’ will take you closer to the target cell 9, while the actions ‘down’ and ‘left’ will take you away from the target cell. So when you are in state 5, actions ‘up’ and ‘right’ are more valuable.
This function calculates the intrinsic value of performing an action when you are in state ‘s’.
Also known as the q-function, q(s, a) is the reward you can expect if you take an action ‘a’ in state ‘s’.
For example, if you are near the airport at 6:30 pm in the evening, the action of going to the airport by 8 pm is very valuable. Why? Because many flights land at around 8 pm in the evening, so the cab driver will be expected to get many long-distance rides at 8 pm if he is at the airport at that time.
To summarise,
- The state-value function v(s) is the total reward an agent can expect if it is in state s
- The action-value function q(s, a) is the total reward an agent can expect if it performs an action ‘a’ when it is in the state ‘s’
- The state-value function and action-value function reflects the expected total reward and not the immediate reward.
Once you fix the policy, the value and the q-function are fixed.
Therefore, we subscript both state and action-value functions with policy :
Optimal Policy
The objective of an RL agent is to find the best action to take in a given state, i.e. to learn an optimal policy.
A policy is called optimal only if
But, is just a mapping (of what actions to take in a given state). How can we compare two mappings? We must have some metric to say one policy is better than another.
Policy is better than if, for all states, the value function is higher if you follow policy than if you follow policy . Mathematically,
if
Model of the Environment
There are broadly two types of frameworks in RL: model-based and model-free.
- In model-based methods, it is possible to learn what is called a model of the environment, i.e. a model which maps the consequences (next state, reward) of taking an action in a state.
- In model-free methods, it is not possible to learn an explicit model (which is a more realistic case).
In most cases, the environment is stochastic, i.e., most of the times you will see different rewards and states after taking a particular action in a particular state. Therefore, the model is represented as:
It is the probabilistic distribution of finding the agent in state 's' and reaping the reward r, given a particular action a is taken in a particular state s. This is known as the model of the environment.
In most real-world scenarios, you wouldn’t know what exactly the model of the environment is. You implicitly infer about the model from the observations and the RL techniqes used to solve such problems are called model-free.
So, the objective of an RL agent is to find the optimal policy either using the explicit model (model-based) or by implicitly inferring the model from the actions taken from various states (model-free).
Difference between policy and model of the environment
- Model of the environment defines which state the agent will land into and what reward it will get for taking an action from state s; whereas policy defines what action the agent should take from a state
Reinforcement Learning vs Supervised Learning
- In reinforcement learning, you deal with the processes where the agent actively interacts with the environment. Whereas in supervised learning, you deal with objects or datasets. There is no interaction with the environment and given a dataset, you are required to predict the target.
- RL is an active learning, where the agent learns only by interacting. While supervised learning is passive learning, where the agent learns only by extracting features from a given dataset.
- In supervised learning, there is a ‘target’ or ‘label’ which is the best tag for that observation. Whereas in reinforcement learning, an agent only gets a reward for its action, but the reward doesn’t tell the agent whether this is the best action or not.
- Unlike reinforcement learning, in supervised learning there is no concept of agent taking actions and observing the consequence of its actions.
- In supervised learning, there is a teacher (ground-truth) which tells you whether the result for a given observation is correct or not. And, then the model can be improved by minimising the error term.
- On the other hand, in reinforcement learning, there is no teacher. The environment acts only as a critic, where it tells you how good or bad the action is by giving rewards. It doesn’t tell whether the action taken is the ultimate best or not.
Questions
Classify problems into RL or SL
| Problem Statement | RL or SL |
|---|---|
| A drone is learning to classify an image as human face or not. Is this supervised or RL? | Supervised Learning |
| Your manager tells you to design a model to predict future sales to maximise the profit. He asks you to use last 3 years dataset and come up with a model. | Supervised Learning |
| You decide to improve grades in class by observing your current grades and then deciding how much time you need to put to improve the current grades. Your objective is to maximise total grades earned in a semester | Reinforcement Learning |
| Suppose, one day, you decide to learn to fly an aeroplane. So, learning to fly is: | Reinforcement Learning |
| You are the owner of a retail shop and you want to learn how much order to place each day to meet the demand so that you can earn maximum profit? The order that you’ll place will be judged on how much profit you make. And it is for you to decide how much profit is good for you. | Reinforcement Learning |
Summary
Reinforcement learning is about learning from interaction with the environment. The objective is to learn how to behave in order to achieve a goal.
In a reinforcement learning problem,
- an agent learns how to behave in an environment by taking actions and seeing the consequences - rewards and change in state.
- The control objective of the agent is to learn a policy to accumulate maximum rewards over a period of time.
- The entire reinforcement learning problem is based on the Markov assumption: the current state contains all relevant information to take the future action.
You also learnt about deterministic and stochastic policy, and how the stochastic policy gives a window for exploration.
Then, you learnt about value function and action-value (q-value) functions. These are the expected return from that state, or state–action pair, given that the agent uses the policy.
A policy for which value functions are optimal is an optimal policy. While the optimal value functions for states and state–action pairs are unique for a given MDP, though there can be many optimal policies.
Then, you learn about the model of the environment. In problems, where the agent has a complete knowledge about the environment’s dynamics we call them as model-based problems. In the case when a complete model of the environment is not available, we call those problems as model-free.
Questions
An agent is learning to play the game of chess. His policy is deterministic, i.e. when in state s he always takes the action a. According to him, everytime he takes the action a in the state s, he should end up in the same new state s' and get the same reward r. However, this is not the case. Each time he is taking the action a in state s, he is landing in a very different new state (which is not s') and getting a very different reward (which is not equal to r).
Why is he getting a different reward and a different next state on taking the same action in state s?
- Environment is stochastic
- Since the environment is stochastic, taking the same action from the same state is giving him a different consequence. In chess. it is similar to your opponent changing his strategy every time you make a particular move in the state s
"Value Function tells how good it is for the agent to perform an action in a given state". State True or False.
- False
- Value Function tells how good it is for the agent to be in a given state